周总结(5月4日-5月11日)
周总结(5月4日-5月11日)
一、机器学习
这一周在机器学习上完成了回归模型、决策树模型以及神经网络模型的学习。
线性回归模型
回归模型包含有线性回归以及逻辑回归。线性回归主要用于预测问题,而逻辑回归则是用于分类
1. 线性回归的原理
线性回归试图通过一个线性函数来拟合输入特征与输出之间的关系:
其中:
- :输出变量(目标变量)
- :输入特征
- :模型参数(权重)
2. 目标函数(损失函数)
最小化预测值与真实值之间的均方误差(Mean Squared Error, MSE):
3. 求解方法
- 解析解(正规方程法):
- 梯度下降法(Gradient Descent)等迭代优化方法
逻辑回归模型
1. 基本思想
逻辑回归虽然名字中有“回归”,但它是一个分类模型,常用于二分类问题。
它通过将线性回归的结果输入到 Sigmoid 函数中,将其映射到 [0,1] 区间,表示样本属于某一类的概率:
最终分类结果由阈值决定(通常取0.5):
2. 目标函数(损失函数)
使用对数损失函数(也叫交叉熵损失):
决策树模型
1. 基本思想
决策树是一种监督学习算法,可用于分类任务和回归任务。它通过递归选择最优特征,并根据特征值对数据集进行分割,形成一个树形结构。
- 分类树:输出类别标签(如:是否购买商品)
- 回归树:输出连续数值(如:房价)
2. 模型结构
决策树由以下几部分组成:
- 根节点(Root Node) :整个样本集合
- 内部节点(Internal Node) :表示一个特征或属性
- 分支(Branch) :表示某个特征的一个取值
- 叶子节点(Leaf Node) :代表最终的预测结果(类别或数值)
决策树的构建过程
决策树的构建是一个自上而下、分而治之的过程:
- 选择最优特征:从所有特征中选出一个“最有区分能力”的特征。
- 划分数据集:根据该特征的不同取值,将数据集划分为若干子集。
- 递归建树:对每个子集重复上述步骤,直到满足终止条件(如达到最大深度、样本数太少、纯度足够高等)。
划分选择
(1)、信息增益公式[ID3]:
给定一个数据集 和一个特征 ,信息增益表示为:
其中:
- :数据集 的经验熵(Entropy) ,表示数据集的混乱程度。
- :在已知特征 的条件下,数据集 的条件熵,表示使用特征 划分后的平均混乱程度。
熵:对于一个样本集合 ,设类别有 个,第 类的样本占比为 ,熵为:
条件熵:设特征 有 个可能的取值 ,每个取值对应的子集记作 ,大小为 。条件熵为:
(2)基尼指数[CART]:
决策树的优化方法
-
剪枝(Pruning) :防止过拟合
- 预剪枝(Pre-pruning):提前停止树的增长
- 后剪枝(Post-pruning):先生长完整棵树再剪枝
-
集成方法:如随机森林(Random Forest)、梯度提升树(GBDT)、XGBoost 等,利用多个决策树组合提高性能
神经网络模型

神经网络(Neural Network)是一种通过模拟神经元之间的连接关系,从数据中自动学习特征和规律的模型。神经网络能够自动学习复杂非线性关系并端到端提取特征,在图像、语音和自然语言处理等领域表现优异,但其依赖大量数据与计算资源,训练耗时且调参困难,模型可解释性较差。
一、神经网络的基本原理
1. 基本组成单元:神经元(Neuron)
一个神经元接收多个输入信号,每个信号都有一个权重(Weight),经过加权求和并通过一个激活函数(Activation Function)处理后输出:
- :输入特征
- :对应权重
- :偏置项(Bias)
- :激活函数
- :输出结果
2. 神经网络的结构
典型的神经网络由以下几层构成:
| 层级名称 | 功能说明 |
|---|---|
| 输入层(Input Layer) | 接收原始数据输入,如图像像素、文本向量等 |
| 隐藏层(Hidden Layers) | 若干层,用于提取数据的高阶特征,层数越多越“深” |
| 输出层(Output Layer) | 输出最终预测结果,如分类标签或回归值 |
二、神经网络的工作流程
神经网络的训练过程主要分为两个阶段:
1. 前向传播(Forward Propagation)
输入数据逐层传递,每一层计算加权和并应用激活函数,直到输出层得到预测结果。
例如,在第 层:
其中:
- :线性组合结果
- :该层的输出(激活值)
2. 反向传播(Backward Propagation)
根据预测误差,从输出层反向传播到输入层,使用梯度下降法更新参数(权重和偏置)以最小化损失函数。
损失函数(Loss Function):
-
分类任务常用交叉熵损失(Cross Entropy Loss):
-
回归任务常用均方误差(MSE):
参数更新公式(梯度下降):
- :学习率(Learning Rate)
- :损失对参数的梯度
三、激活函数(Activation Functions)
激活函数引入非线性能力,使神经网络可以拟合复杂函数。
| 函数名 | 公式 | 特点 |
|---|---|---|
| Sigmoid | | 输出在 (0,1),适合二分类输出层,但易梯度消失 |
| Tanh | | 输出在 (-1,1),比Sigmoid中心对称,收敛更快 |
| ReLU(最常用) | | 简单高效,缓解梯度消失问题 |
| Softmax | | 多分类输出层用,输出概率分布 |
四、训练流程总结(完整步骤)
- 初始化参数:随机初始化权重和偏置
- 前向传播:计算每层输出,直到得到预测值
- 计算损失:比较预测值与真实值的差距
- 反向传播:计算损失对参数的梯度
- 更新参数:使用梯度下降更新权重和偏置
- 重复迭代:直到达到最大训练轮数(Epoch)或损失收敛
二、算法
本周算法学习的是排序和查找
(1)排序:sort
在 C++ 中,排序主要通过标准库函数 std::sort 实现。该函数定义在头文件 <algorithm> 中,可以对数组、vector 等容器进行高效排序。
基本用法:
1 | |
自定义排序规则(Compare 函数)
若需要自定义排序规则,可以通过传入一个比较函数作为第三个参数:
1 | |
-
compare 函数必须返回布尔值; - 参数类型应与容器元素类型一致;
- 若希望
lhs 排在rhs 前面,返回true,否则返回false。
示例:奇数从大到小,偶数从小到大排序
以下示例实现了将整型数组中的奇数按降序排列,偶数按升序排列:
1 | |
📌 注意事项
-
sort 的时间复杂度为 O(n log n) ,使用的是混合排序算法(IntroSort),效率高。 - 数组名
arr 在作为参数传递时会退化为指针,因此arr + 10 表示数组末尾的下一个位置。 - 对
vector 使用时,推荐使用vec.begin() 和vec.end() 来指定范围:
1 | |
(2)查找
1. 二分查找(Binary Search)
适用于有序数据结构(如排序数组、vector),通过不断缩小查找范围快速定位目标值。
- 优点:查找效率高,空间利用率好。
- 缺点:仅适用于静态或不频繁修改的数据,插入/删除代价较高。
时间复杂度:
| 操作 | 时间复杂度 |
|---|---|
| 查找 | O(log n) |
| 插入/删除 | O(n) |
2. map 查找(有序)
底层实现为红黑树,自动按键排序,适用于需要按顺序访问键值对的场景。
- 优点:支持有序遍历,可直接使用迭代器获取最小/最大键等。
- 缺点:额外空间开销,插入/删除较慢。
时间复杂度:
| 操作 | 时间复杂度 |
|---|---|
| 查找、插入、删除 | O(log n) |
3. unordered_map 查找(无序)
底层实现为哈希表,无序但查找速度极快,适合只关心是否存在或统计频率的场景。
- 优点:平均时间复杂度为 O(1),适合大数据量下高效查找。
- 缺点:最坏情况下退化为 O(n),且不保证元素顺序。
时间复杂度:
| 操作 | 平均复杂度 | 最坏复杂度 |
|---|---|---|
| 查找、插入、删除 | O(1) | O(n) |
🌰 问题:找出出现次数超过一半的元素
给定一个整型数组
nums,请找出其中出现次数超过数组长度一半的元素。
假设数组非空,且一定存在这个数。
示例:
1 | |
方法一:使用 map 统计频率
1 | |
- 特点:有序结构,便于调试查看键值顺序;
- 时间复杂度:O(n log n);
- 适用场景:需要保持键顺序时使用。
方法二:使用 unordered_map 统计频率(推荐)
1 | |
- 特点:平均 O(1) 的查找和插入,效率更高;
- 时间复杂度:O(n);
- 适用场景:仅需查找,不需要顺序性,适合大规模数据。
方法三:排序 + 取中间值
1 | |
- 原理:由于该元素出现次数超过一半,排序后它必定位于中间位置;
- 特点:无需额外空间,适合内存敏感的场景;
- 时间复杂度:O(n log n);
- 空间复杂度:O(1)(若允许修改原数组);
三、拓扑
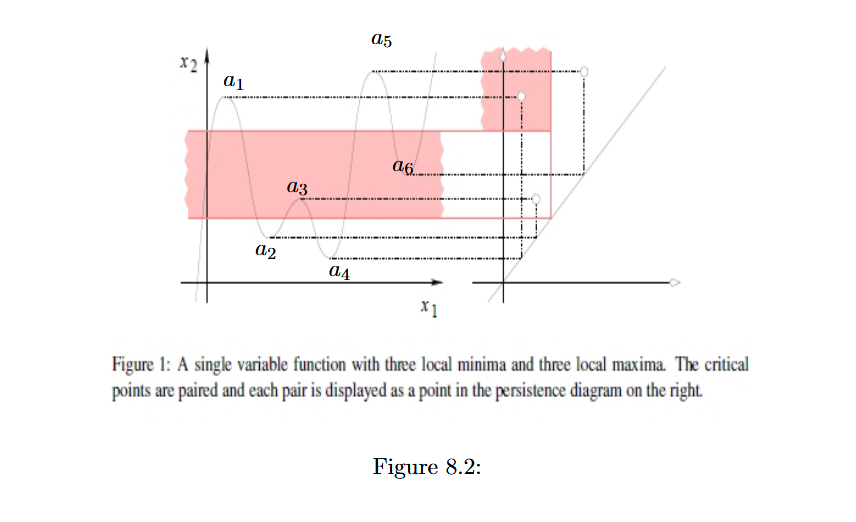
目前我学到了持续同调(Persistent Homology) ,这是拓扑数据分析中的一个核心概念。它用于研究数据在不同尺度下的拓扑特征变化,尤其是如何从简单结构演化出复杂的拓扑特征,并追踪这些特征的“出生”和“死亡”。
1. 基本背景与动机
持续同调的核心目标是理解数据集在多尺度下表现出的拓扑性质。通常我们面对的数据可能是点云或图像,它们本身没有显式的几何结构,但可以通过构造滤子序列(filtration)将它们映射到一个具有层次结构的空间中,从而捕捉其连通性、洞的数量等信息。
例如,在分析一个实值函数 时,可以定义其次水平集(sublevel set):
随着参数 增大, 逐渐包含更多的数据,形成一个嵌套增长的拓扑空间序列(filtration)。通过计算每个阶段的同调群,我们可以观察拓扑特征的变化过程。
2. 持续图(Persistence Diagram)
持续图是一种二维平面上的可视化工具,用于表示所有拓扑特征的出生与死亡时间。图上的每个点 对应一个 -维持续同调类,横坐标表示出生时间,纵坐标表示死亡时间。
- 如果 ,则该点位于对角线 上,表示该特征瞬间出现又消失。
- 点离对角线越远,说明该特征越“持久”,即在数据中更稳定地存在。
- 图中还可能包含多个点,代表不同维度的拓扑特征(如连通区域、环、空洞等)。
3. 持续同调的算法实现:
(1)构建联合边缘矩阵
对于每个单纯形 ,构造一个边界矩阵 ,其中:
这个矩阵记录了单纯复形之间的边界关系。
(2)矩阵的性质
- 稀疏性 :由于每个单纯形只可能有几个低维的面,所以大多数位置为 0。
- 上三角结构 :如果单纯形按滤子顺序排列,则矩阵具有近似上三角的形式,因为后面的单纯形不会成为前面的面。
- 模 2 运算 :在拓扑数据分析中,通常使用 Z2 域(即二进制域),因此所有的运算都在模 2 下进行。
(3)高斯消元法求解
联合边界矩阵的关键用途是用于高斯消元(Gaussian elimination) ,以提取持续对(persistence pairs)。具体步骤如下:
步骤 1:初始化
从最左边一列开始处理,每列代表一个单纯形。
步骤 2:寻找主元(pivot)
对于当前列 j,找到最低非零行索引 low(j),即该列中最后一个非零元素所在的行号。
步骤 3:消元
如果存在另一列 j′<j,使得 low(j′)=low(j),则将第 j′ 列加到第 j 列(模 2 加法),使得当前列的主元变为 0。
步骤 4:标记持续对
当某一列无法再被其他列消去时,就形成一个持续对 (birth,death),表示某个拓扑特征在何时出生、何时死亡。
(4)Betti 数与持续性
定义了一个衡量持续性的指标:
其中 是第 到第 阶段的 -维 Betti 数。这个公式用于量化某个拓扑特征在特定区间内的稳定性。
四、下一周计划
后两周即将参加GXCPC,以算法的学习为主,机器学习也继续推进,同时要在翻译上下点功夫。本周计划将算法推进到第6章的递归和分治,机器学习进行到第七章的贝叶斯分类,同时活动有:周五要去深圳参观哈工深,周日还需要进行拓扑学习的分享。因此本周需要我合理安排学习时间,提高学习效率。