数据结构(二)
数据结构(二)
第四章:树和二叉树
一、树的定义
1. 基本概念
树(Tree) :是 n(n ≥ 0)个结点的有限集合。当 n = 0 时称为空树。有一个特定的结点称为根结点(Root) 。其余结点可分为 m(m ≥ 0)个互不相交的有限集合,每个集合本身就是一棵树,称为根的子树(Subtree) 。
2. 基本术语
-
结点的度:子树的个数。
-
树的度:所有结点中最大的度。
-
叶结点(终端结点) :度为 0 的结点。
-
分支结点(非终端结点) :度不为 0 的结点。
-
孩子、双亲、兄弟:父子关系。
-
路径与路径长度:从一个结点到另一个结点所经过的边数。
-
层次、深度、高度:
- 根结点在第 1 层(或第 0 层)。
- 结点的深度:从根到该结点的层数。
- 树的高度:所有结点中最大深度。
二、二叉树的性质(重点)
1. 二叉树定义
每个结点最多有两个子树(左子树、右子树),且左右子树有顺序之分。
2. 五条重要性质(常考选择题、填空题)
设二叉树的深度为 h,结点总数为 n
| 性质 | 内容 |
|---|---|
| 性质1 | 第 i 层最多有 个结点(i ≥ 1) |
| 性质2 | 深度为 h 的二叉树最多有 个结点(满二叉树) |
| 性质3 | 对任何二叉树,若度为 0 的结点数为 ,度为 2 的结点数为 ,则: |
| 性质4 | 具有 n 个结点的完全二叉树的深度为: |
| 性质5 | 完全二叉树中,编号为 i 的结点: - 若 ,则左孩子编号为 - 若 ,则右孩子编号为 - 若 ,则双亲编号为 |
三、线索化二叉树(Threaded Binary Tree)
1. 为什么需要线索化?
普通二叉树遍历依赖栈或递归,空间开销大。线索化是为了高效实现非递归遍历,利用空指针指向前驱/后继。
2. 线索化原理
-
利用空指针域:若左孩子为空,令其指向前驱;右孩子为空,指向后继。
-
增加两个标志位:
ltag:0 表示 left 指向左孩子,1 表示指向前驱 -
rtag:0 表示 right 指向右孩子,1 表示指向后继
3. 三种线索化
- 前序线索二叉树
- 中序线索二叉树(最常见)
- 后序线索二叉树
4. 线索化的作用
- 实现非递归、不使用栈的遍历
- 节省空间,提高效率
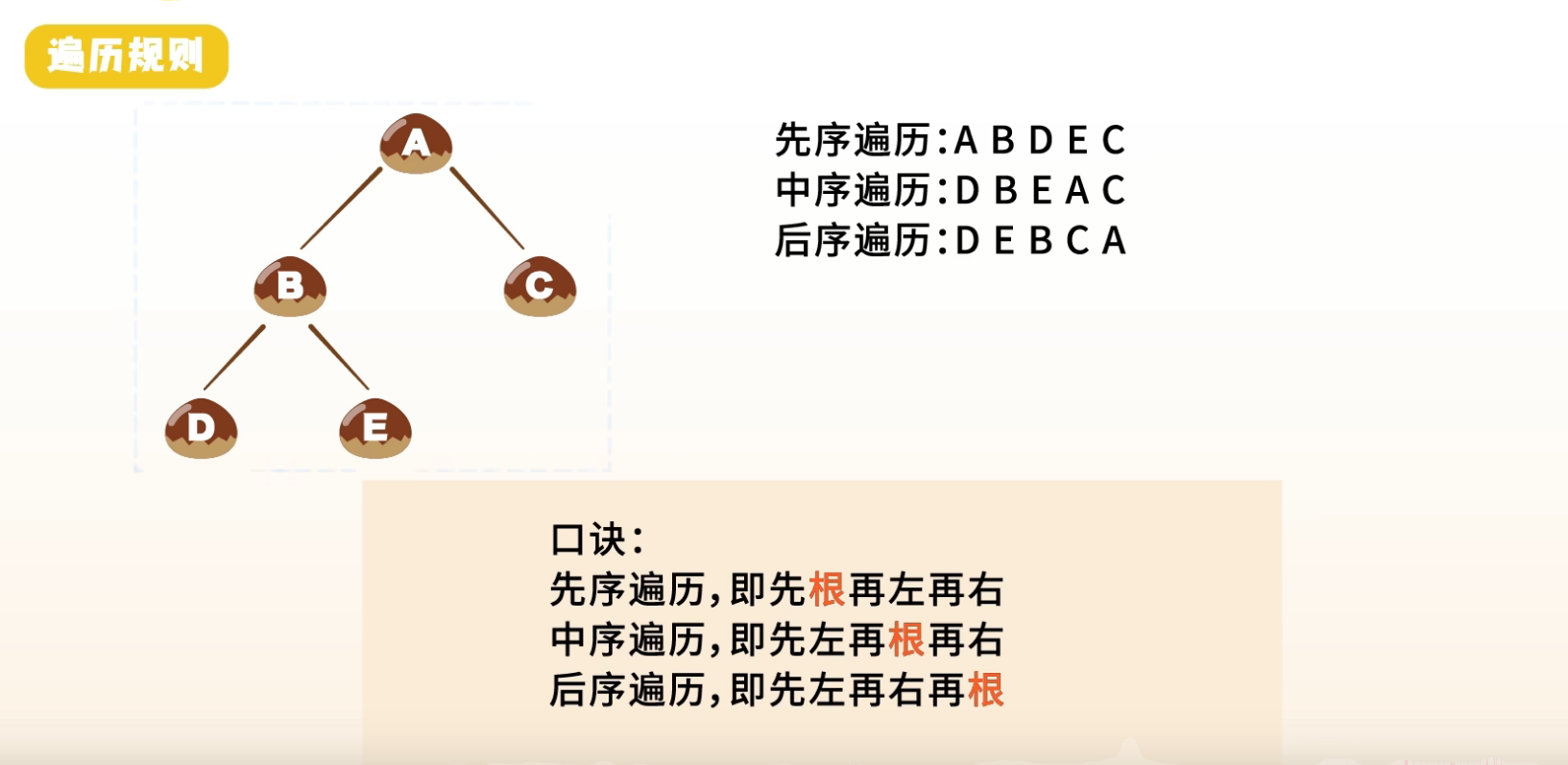
四、树与二叉树的转换(常考画图题)
1. 树 → 二叉树(左孩子右兄弟表示法)
规则:
- 每个结点的左指针指向它的第一个孩子
- 右指针指向它的下一个兄弟
2. 森林 → 二叉树
- 将每棵树转为二叉树
- 第一棵树的根作为总根
- 后面各树的根作为前一棵树根的“右兄弟”(即挂在右子树链上)
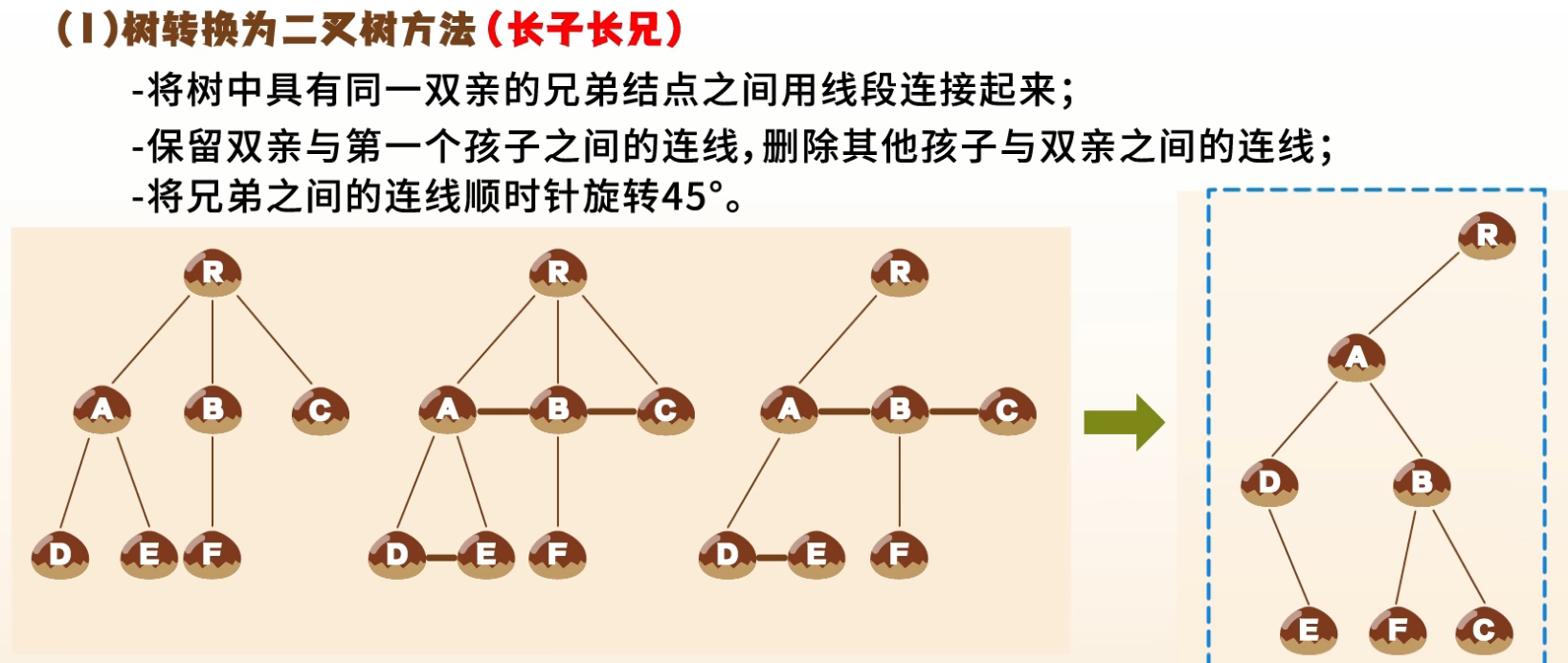
3. 二叉树 → 树/森林
- 逆过程:右孩子视为兄弟,左孩子视为孩子
- 断开所有“右子树”连接,形成多棵树 → 森林
五、哈夫曼编码(Huffman Coding)——重点应用!
1. 哈夫曼树(最优二叉树)
- 带权路径长度(WPL)最小的二叉树
- 权值大的结点尽量靠近根
2. 构造哈夫曼树(贪心算法)
步骤:
- 把每个权值当作一个独立的结点(叶子)
- 选两个权值最小的结点合并,生成新结点,权值为两者之和
- 放回集合,重复直到只剩一棵树
✅ 注意:每次选最小的两个,不排序也可以,但通常排序方便
3. 哈夫曼编码
- 从根到叶子的路径:左分支为 0,右分支为 1(或反之)
- 得到的二进制串即为该字符的编码
- 特点:前缀编码(任一编码不是另一个的前缀),可唯一解码
第六章:图
一、图的定义(基础概念)
1. 基本定义
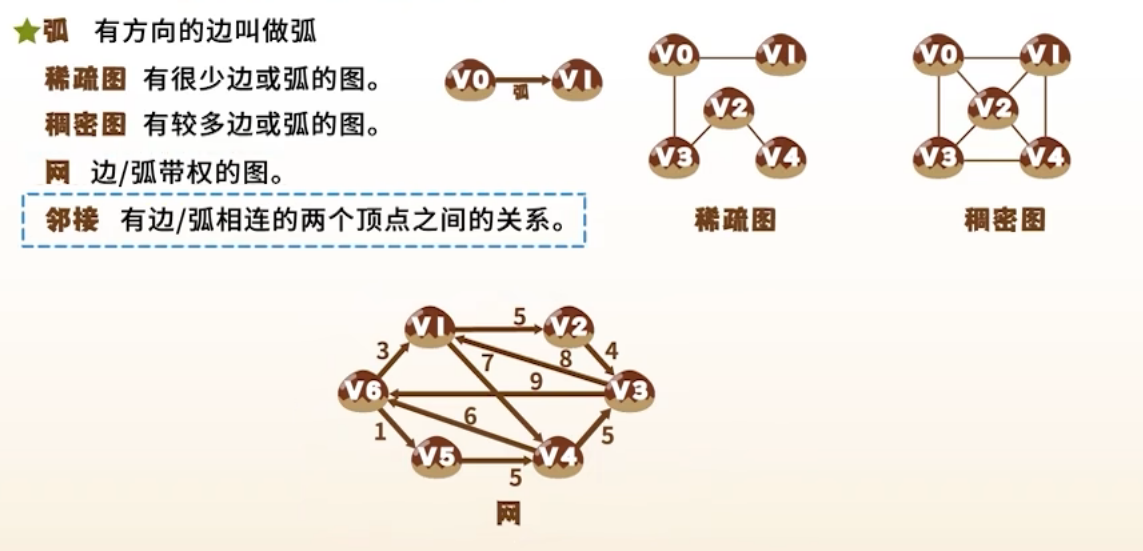
- 图(Graph) :由顶点集合 和边集合 组成,记作
- 顶点(Vertex) :数据元素
- 边(Edge) :连接两个顶点的结构
2. 分类
| 类型 | 说明 |
|---|---|
| 无向图 | 边无方向, |
| 有向图 | 边有方向, |
| 带权图(网) | 每条边有数值(权重) |
| 简单图 | 无自环、无重边 |
| 完全图 | 每对顶点之间都有边 |
| - 无向完全图:边数 = - 有向完全图:边数 = |
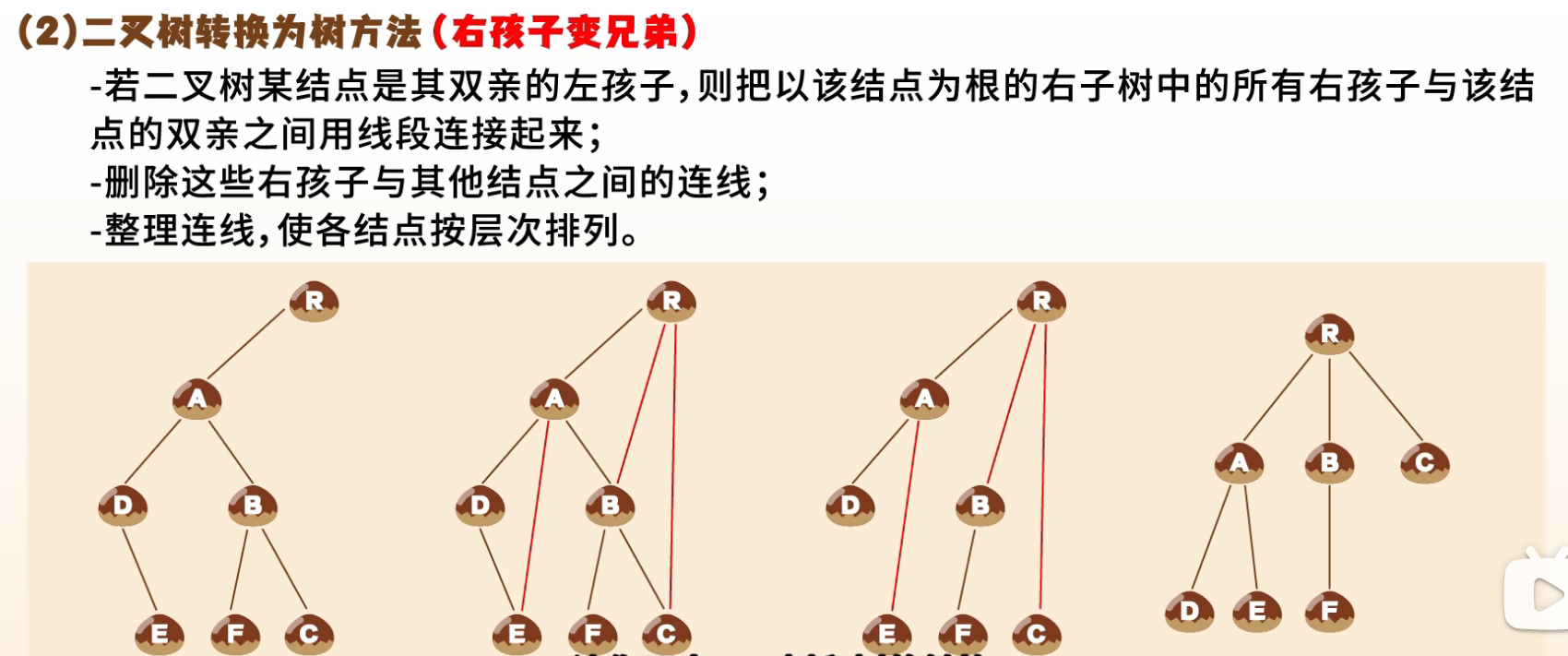
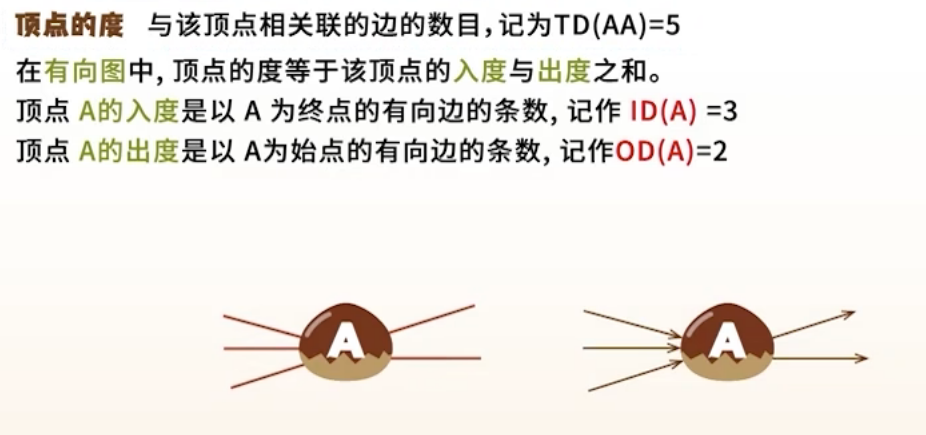
3. 基本术语
-
度(Degree) :
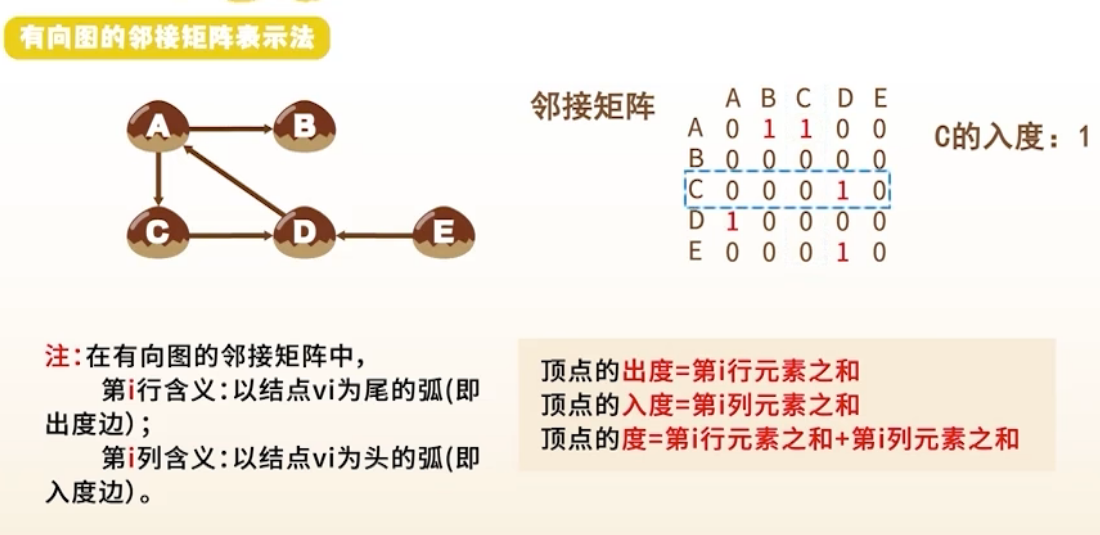
无向图:一个顶点的边数;有向图:入度(指向该点) + 出度(从该点指出)
- 路径、路径长度、回路(环)
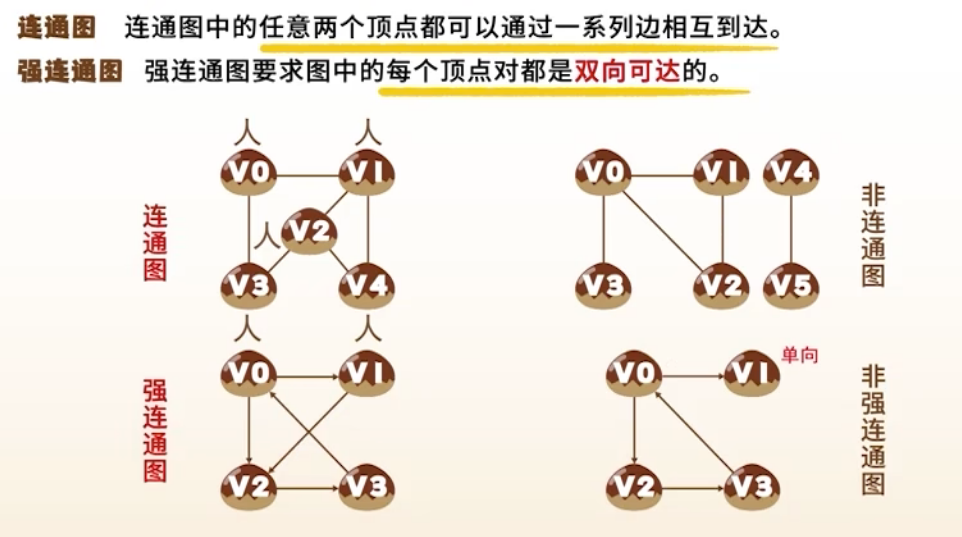
- 连通图(无向图中任意两点可达);强连通图(有向图中任意两点互相可达)
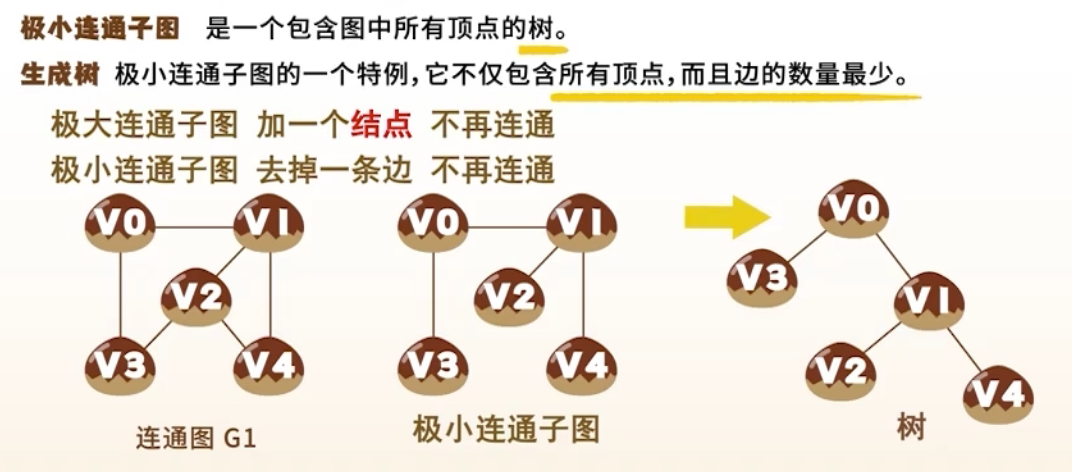
- 生成树:连通图的极小连通子图,含所有顶点, 条边\
二、图的表示法(存储结构)
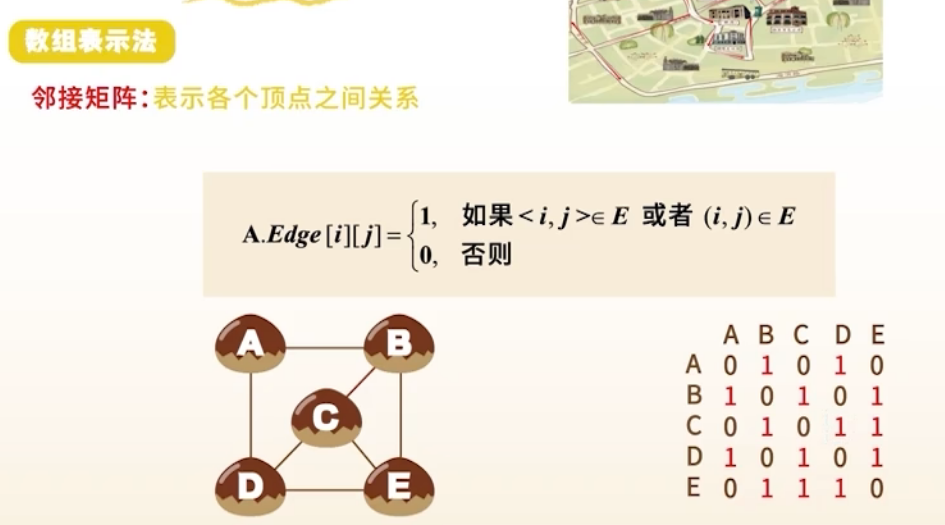
1. 邻接矩阵表示法(Adjacency Matrix)
结构
- 用二维数组 表示边
- 表示有边(或权重),否则为 0 或 ∞
特点
| 优点 | 缺点 |
|---|---|
| 实现简单,适合稠密图 | 空间复杂度 ,浪费空间(稀疏图) |
| 判断边是否存在快 | 添加/删除顶点代价高 |
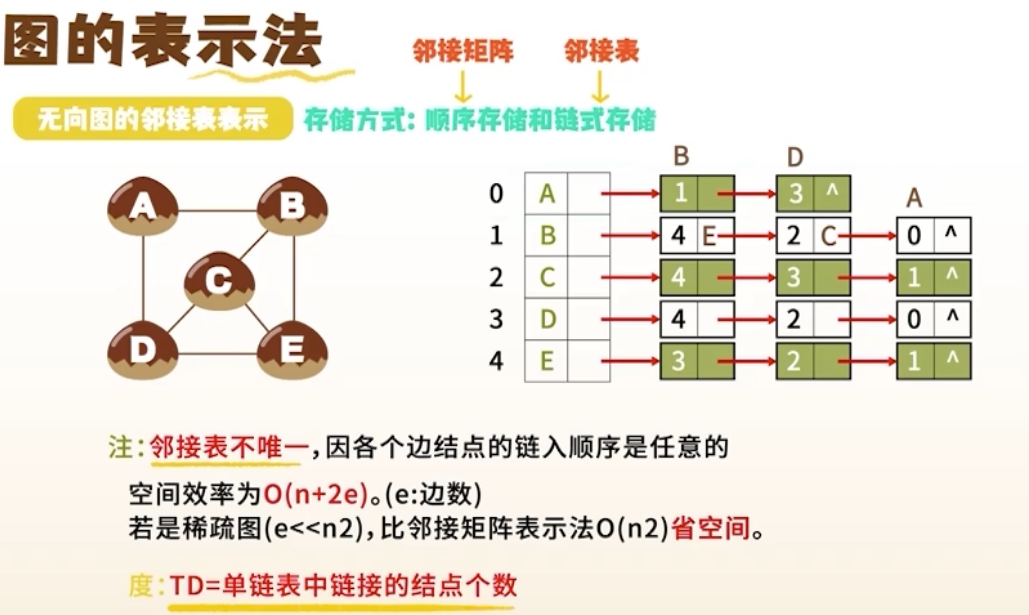
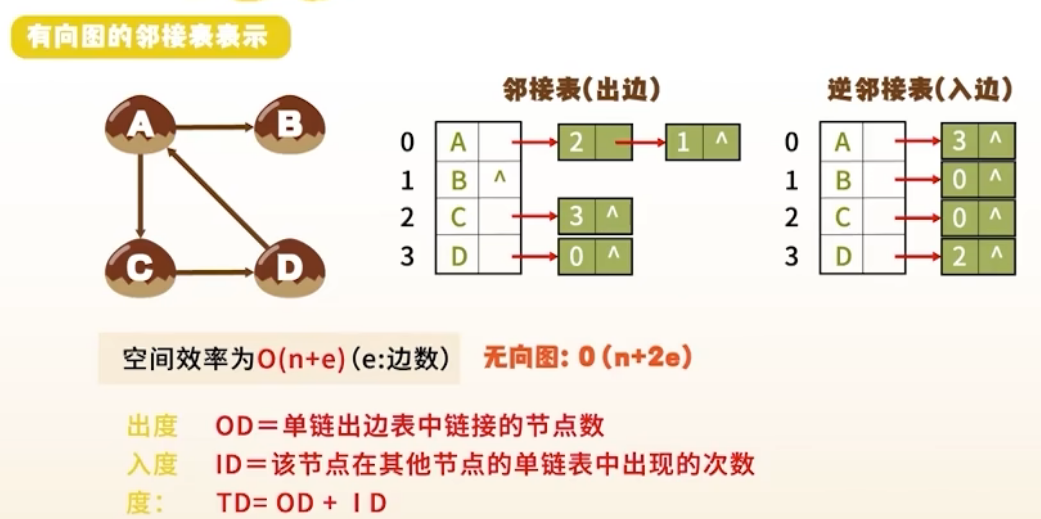
2. 邻接表表示法(Adjacency List)
结构
- 每个顶点对应一个链表,存储其所有邻接点
- 带权图:链表结点包含
vertex, weight, next
特点
| 优点 | 缺点 |
|---|---|
| 空间省,适合稀疏图 | 判断边存在需遍历链表 |
| 易于遍历邻接点 | 实现稍复杂 |
三、图的遍历(核心算法)
1. 深度优先搜索(DFS, Depth-First Search)
思想
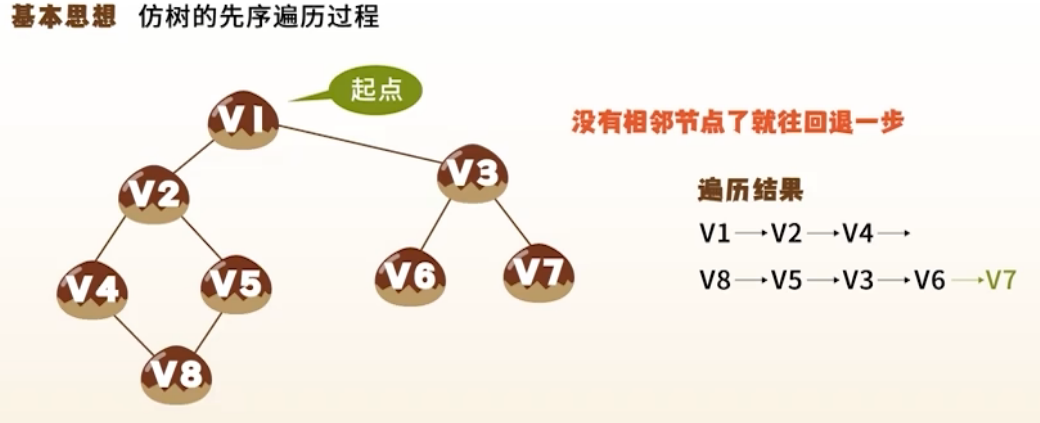
类似树的先序遍历
“一条路走到黑”,回溯再探其他路径
使用 递归 或 栈
算法步骤
- 访问当前顶点,标记已访问
- 找到一个未访问的邻接点,递归 DFS
- 若无未访问邻接点,回溯
时间复杂度
- 邻接矩阵:
- 邻接表:
2. 广度优先搜索(BFS, Breadth-First Search)
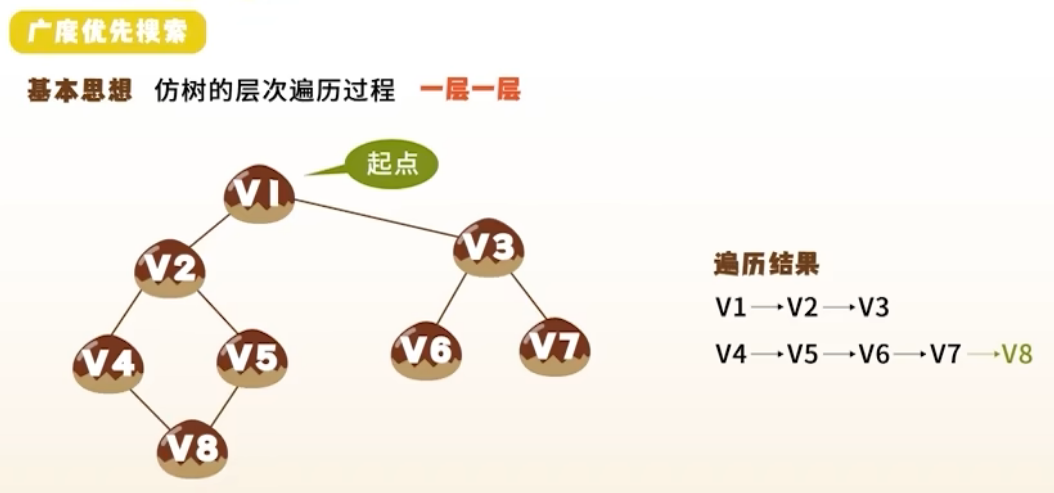
思想
- 类似树的层序遍历
- “一圈一圈往外扩”
- 使用 队列
算法步骤
- 访问起始顶点,入队
- 出队一个顶点,访问其所有未访问邻接点,入队
- 重复直到队列为空
时间复杂度
邻接矩阵:
邻接表:
DFS vs BFS 对比
| 对比项 | DFS | BFS |
|---|---|---|
| 数据结构 | 栈(递归) | 队列 |
| 应用 | 路径存在、拓扑排序 | 最短路径(无权图) |
| 空间 | (深度) | (宽度) |
| 特点 | 深入优先 | 层层扩展 |
四、最小生成树(Minimum Spanning Tree, MST)
适用于连通无向带权图,目标:选 条边,连接所有顶点,总权值最小。
1. Prim 算法(普里姆)
思想
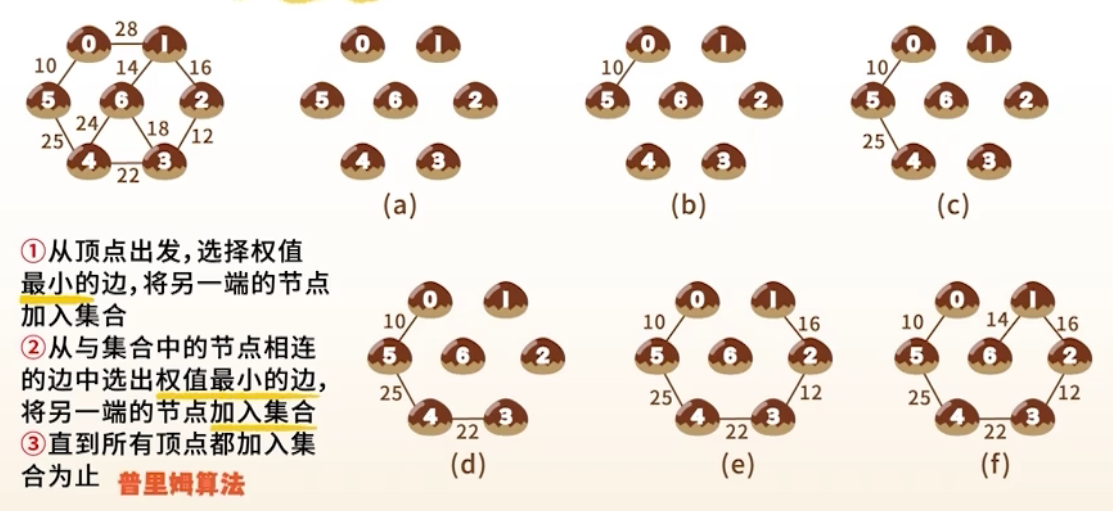
- 从点出发,逐步扩展生成树,每次选一个离当前生成树最近的顶点加入,类似 Dijkstra(贪心)
时间复杂度
邻接矩阵:
优先队列优化:
2. Kruskal 算法(克鲁斯卡尔)
思想
从边出发,每次选权值最小且不构成环的边,使用 并查集 判断是否连通(是否成环)
时间复杂度
Prim vs Kruskal 对比
| 对比项 | Prim | Kruskal |
|---|---|---|
| 出发点 | 顶点 | 边 |
| 适用图 | 稠密图 | 稀疏图 |
| 数据结构 | 距离数组 | 并查集 + 边排序 |
| 是否需连通 | 是(Prim 从一个点开始) | 否(Kruskal 可判断是否连通) |
五、最短路径(Shortest Path)
1. Dijkstra 算法(单源最短路径)
适用
- 带权图(权 ≥ 0)
- 求一个源点到其他所有顶点的最短路径
思想
- 贪心策略:每次选距离最小的未确定顶点,更新其邻接点
- 使用
dist[] 数组记录最短距离
时间复杂度
- 邻接矩阵:
- 优先队列优化:
| 步骤 | 当前选点 | dist[0] | dist[1] | … | 前驱 |
|---|---|---|---|---|---|
| 初始化 | - | 0 | ∞ | … | - |
2. Floyd 算法(多源最短路径)
适用
- 求任意两点间的最短路径
- 可处理负权边(但不能有负权环)
思想
- 动态规划:
- 通常用二维数组滚动:
dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j])
时间复杂度
Dijkstra vs Floyd 对比
| 对比项 | Dijkstra | Floyd |
|---|---|---|
| 源点 | 单源 | 多源(所有点对) |
| 时间复杂度 | ||
| 负权边 | ❌ 不行 | ✅ 可以(无负环) |
| 实现难度 | 中等 | 简单(三重循环) |
第七章:查找
一、查找的基本原理
1. 什么是查找?
- 在一个数据集合中寻找某个“特定元素”是否存在的过程。
- 查找成功:返回该元素的位置或信息
- 查找失败:返回失败标志
2. 查找表(Search Table)
-
由同一类型的数据元素(或记录)构成的集合
-
可分为:
- 静态查找表:只查不改(如顺序、折半、分块查找)
- 动态查找表:支持插入和删除(如二叉排序树、AVL、B树)
3. 关键字(Key)
- 用于标识数据元素的某个字段
- 主关键字:唯一标识(如学号)
- 次关键字:可重复(如姓名)
4. 平均查找长度(ASL, Average Search Length)
- 衡量查找效率的核心指标
- 定义:为确定元素位置,平均需要比较关键字的次数
公式:
- :查找第 个元素的概率
- :找到第 个元素所需的比较次数
二、折半查找(Binary Search)—— 仅适用于有序表
1. 基本思想
在有序顺序表中,每次取中间元素比较。若相等则成功,若目标小,则在左半区继续,若目标大,则在右半区继续
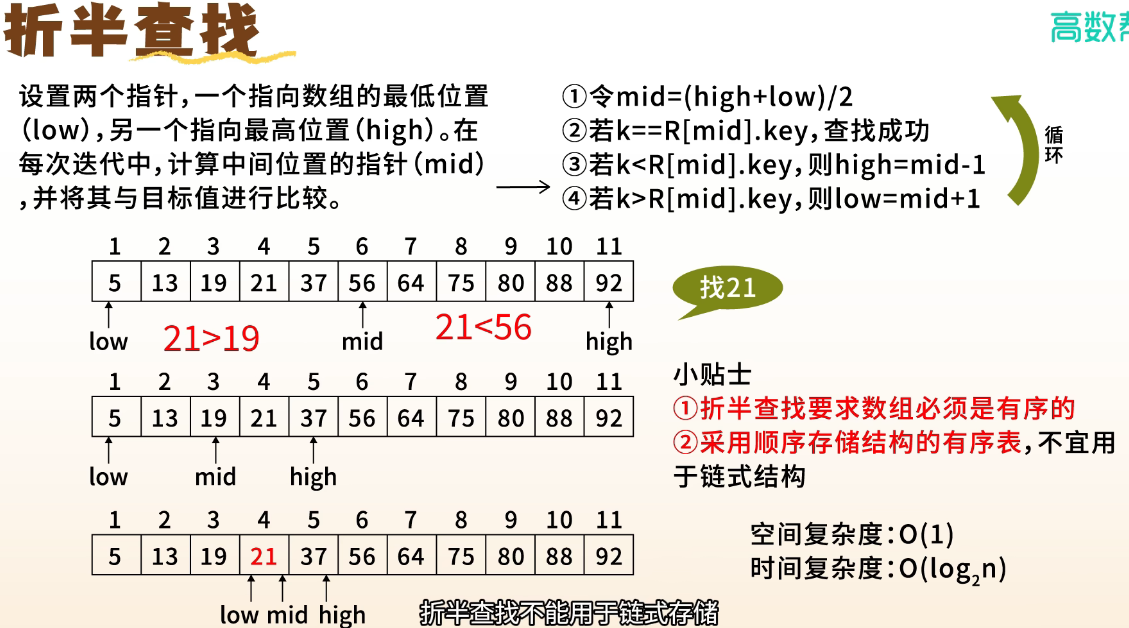
2. 实现方式
1 | |
3. 性能分析
| 情况 | ASL 近似值 |
|---|---|
| 最好情况 | (第一次就命中) |
| 最坏情况 | |
| 平均情况 |
特点:
- 必须是顺序存储 + 有序表
- 不适合频繁插入/删除(维护有序代价高)
三、分块查找(Block Search / Index Sequential Search)
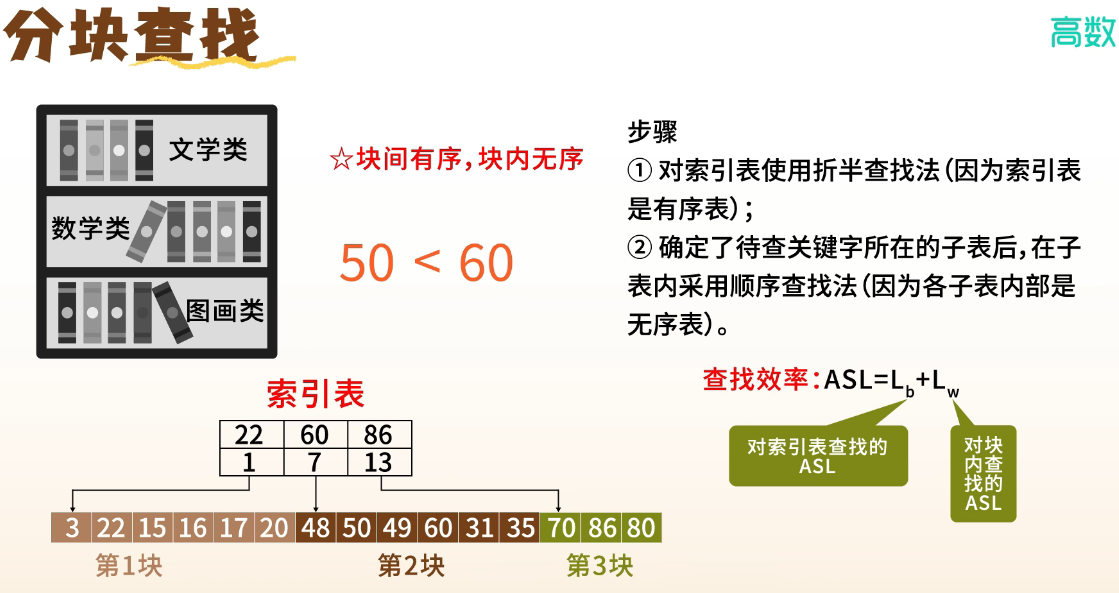
1. 基本思想(折中策略)
- 将表分为若干“块”
- 块内无序,但块间有序(即每块的最大关键字 < 下一块的最小)
- 建立一个索引表,记录每块的最大关键字和起始位置
2. 查找过程
- 在索引表中顺序或折半查找,确定目标在哪一块
- 在该块内进行顺序查找
3. 性能分析
- 若总长 ,分 块,每块 个元素()
- 索引查找 ASL ≈ ,块内查找 ASL ≈
- 总 ASL ≈
- 最优时 ,此时
四、二叉排序树(Binary Search Tree, BST)
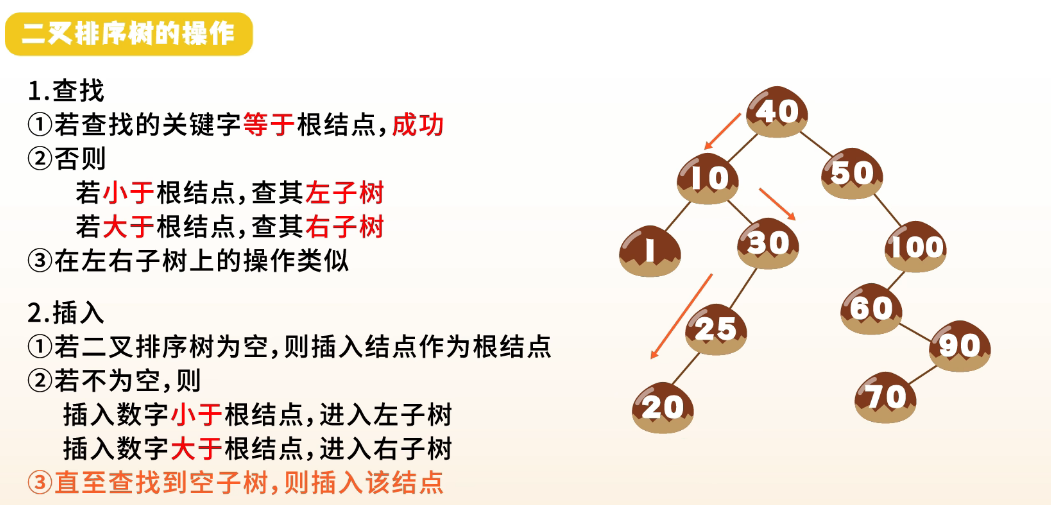
1. 定义
-
空树 或 满足:
左子树非空:所有结点关键字 < 根
右子树非空:所有结点关键字 > 根
-
左右子树也都是二叉排序树
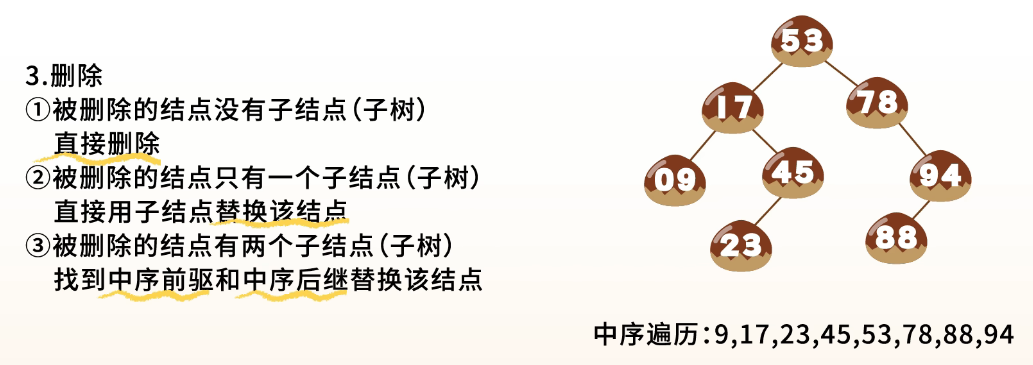
2. 操作
3. 性能分析
| 情况 | 时间复杂度 |
|---|---|
| 最好(平衡) | |
| 最坏(退化为链) |
五、平衡二叉树(AVL Tree)
1. 为什么需要 AVL?
- 解决 BST 可能退化为单支树的问题
2. 定义
- 任意结点的左右子树高度差 ≤ 1
- 是一棵二叉排序树
3. 平衡因子(BF)
- ,只能是 -1, 0, 1
4. 失衡与旋转
插入新结点可能导致失衡,需通过旋转恢复平衡:
| 失衡类型 | 旋转方式 | 口诀 |
|---|---|---|
| LL型(左左) | 右单旋 | “左重右转” |
| RR型(右右) | 左单旋 | “右重左转” |
| LR型(左右) | 先左后右双旋 | “先左转再右转” |
| RL型(右左) | 先右后左双旋 | “先右转再左转” |
5. 性能
- 查找、插入、删除:
- 维护平衡代价较高,适合查找频繁的场景
六、哈希表(Hash Table)—— 散列表
1. 基本思想
- 直接定址:通过关键字直接计算出存储位置
- 核心:
2. 哈希函数构造方法
| 方法 | 说明 | 示例 |
|---|---|---|
| 除留余数法 | (p 为不大于表长的素数) | 最常用 |
| 直接定址法 | 或 | 线性 |
| 数字分析法 | 取关键字中分布均匀的几位 | 多位学号 |
| 平方取中法 | 取 key² 的中间几位 | 适合未知分布 |
3. 冲突(Collision)
- 不同关键字得到相同哈希地址 → 冲突不可避免!
4. 处理冲突的方法
(1)开放定址法(Open Addressing)
- 一旦冲突,就找下一个空位置
- 公式:
| 探测方式 | 序列 | 特点 |
|---|---|---|
| 线性探测 | 易“堆积” | |
| 平方探测 | 避免堆积,但可能找不到空位 | |
| 伪随机探测 | 随机数序列 | 不常用 |
(2)链地址法(拉链法)
- 把冲突的关键字用链表串起来
- 每个哈希地址对应一个单链表
5. 哈希表查找性能
- 理想情况:
- 实际 ASL 与装填因子 α = n/m 有关(n:元素数,m:表长)
- α 越小,冲突越少,但空间利用率低
- 一般建议 α ≤ 0.7~0.8
七、各查找方法对比总结
| 查找方法 | 适用结构 | 时间复杂度(平均) | 是否动态 | 备注 |
|---|---|---|---|---|
| 顺序查找 | 顺序/链式 | ✅ | 最简单 | |
| 折半查找 | 有序顺序表 | ❌ | 静态为主 | |
| 分块查找 | 顺序存储 | ✅ | 折中方案 | |
| 二叉排序树 | 链式 | (最好) | ✅ | 易退化 |
| AVL树 | 链式 | ✅ | 严格平衡 | |
| 哈希表 | 顺序/链式 | ✅ | 冲突处理关键 |
第八章:排序
一、排序的基本概念
1. 什么是排序?
- 将一组无序的记录序列重新排列成按关键字递增或递减的有序序列。
- 输入:n 个记录 ,关键字为
- 输出:重排后使得
2. 内部排序 vs 外部排序
| 类型 | 特点 |
|---|---|
| 内部排序 | 数据全部在内存中完成排序(本章重点) |
| 外部排序 | 数据量太大,需借助外存(如归并排序的外排版本) |
3. 排序的评价指标
| 指标 | 说明 |
|---|---|
| 时间复杂度 | 比较和移动次数,影响运行效率 |
| 空间复杂度 | 额外内存使用量 |
| 稳定性 | 相同关键字的记录,排序后相对位置不变 |
| 适用场景 | 数据规模、初始状态(如是否基本有序) |
二、五大类排序算法详解
1. 插入排序(Insertion Sort)
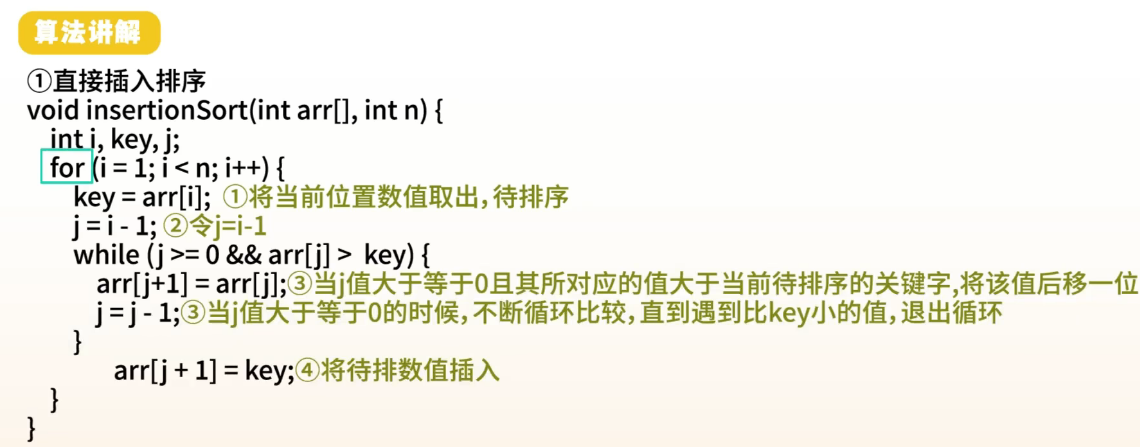
(1)直接插入排序(Straight Insertion Sort)

思想:
- 将每个元素插入到已排序部分的正确位置
- 类似打扑克牌时理牌
步骤:
- 第一个元素视为已排序
- 从第二个开始,依次与前面已排序部分从后往前比较
- 找到合适位置插入(后移元素腾位置)
算法实现:
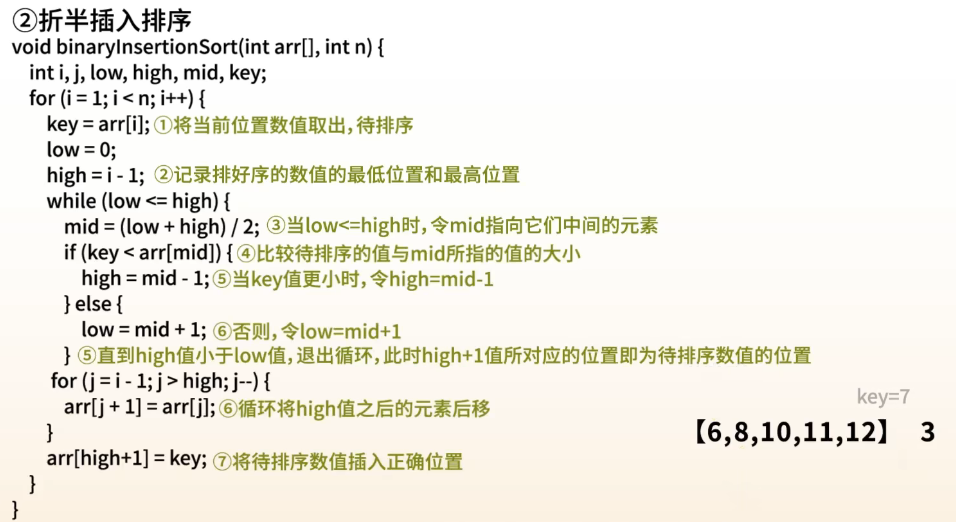
对比折半插入排序
性能分析:
| 情况 | 时间复杂度 | 说明 |
|---|---|---|
| 最好(已有序) | 只比较不移动 | |
| 最坏(逆序) | 每次都要前移 | |
| 平均 | —— | |
| 空间复杂度 | 原地排序 | |
| 稳定性 | 稳定 | 相同元素不会跨过 |
(2)希尔排序(Shell Sort)——插入排序的改进
思想:
- 分组进行直接插入排序
- 初始增量大,逐步缩小增量(最后一趟增量为1)
例子:序列 [9,8,7,6,5,4,3,2,1],增量序列 4→2→1
性能分析:
| 情况 | 时间复杂度 | 说明 |
|---|---|---|
| 平均 | 左右 | 依赖增量序列 |
| 最坏 | 如增量选择不好 | |
| 空间复杂度 | —— | |
| 稳定性 | ❌ 不稳定 | 分组可能导致相同元素相对位置改变 |
2. 交换排序(Exchange Sort)
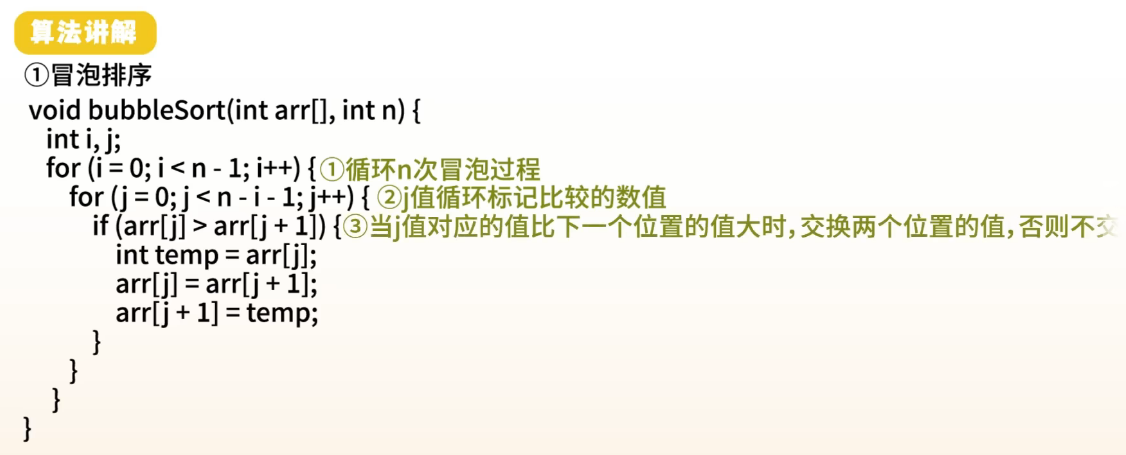
(1)冒泡排序(Bubble Sort)
思想:
- 两两比较相邻元素,逆序则交换
- 每趟将最大(或最小)元素“浮”到末尾
优化:若某趟没有发生交换 → 已有序 → 提前结束
算法实现:
性能分析:
| 情况 | 时间复杂度 |
|---|---|
| 最好(有序) | (带优化) |
| 最坏/平均 | |
| 空间复杂度 | |
| 稳定性 | ✅ 稳定 |
(2)快速排序(Quick Sort)——重点中的重点!
思想(分治法) :
- 选一个基准(pivot)
- 将数组分为两部分:左边 ≤ pivot,右边 ≥ pivot(一次划分 partition)
- 递归对左右子数组排序
划分方法(常用前后指针法) :
- 以第一个元素为 pivot
- 用
i 和j 从两端向中间扫描,交换逆序对 - 最后将 pivot 放到中间正确位置
性能分析:
| 情况 | 时间复杂度 | 说明 |
|---|---|---|
| 最好(每次均分) | 递归深度 | |
| 最坏(已有序,pivot 极端) | 退化为冒泡 | |
| 平均 | 实际表现优秀 | |
| 空间复杂度 | 递归栈深度 | |
| 稳定性 | ❌ 不稳定 | 相同元素可能被交换跨过 |
3. 选择排序(Selection Sort)
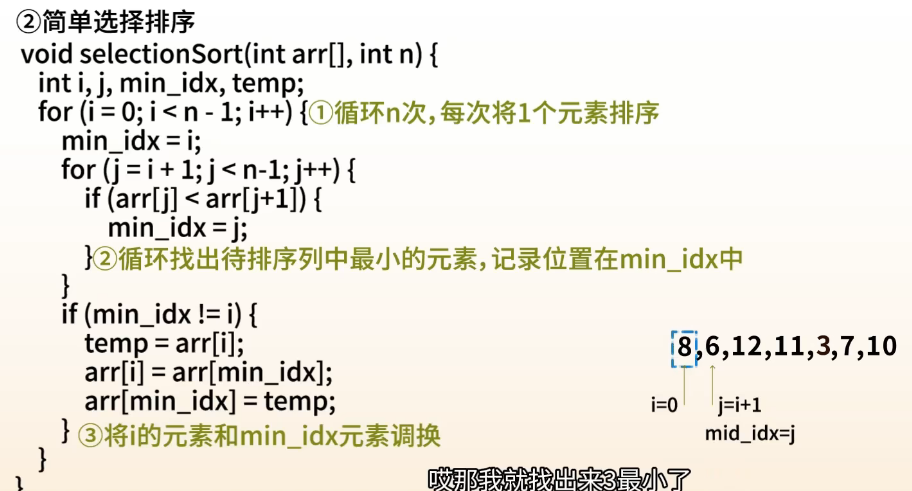
(1)简单选择排序(Simple Selection Sort)
思想:
- 每趟从未排序部分选出最小(或最大)元素
- 与未排序部分的第一个元素交换
步骤:
1 | |
算法实现:
性能分析:
| 情况 | 时间复杂度 | 说明 |
|---|---|---|
| 所有情况 | 每次都要遍历找最小 | |
| 空间复杂度 | 原地排序 | |
| 稳定性 | ❌ 不稳定 | 交换可能破坏相对顺序(如两个12) |
(2)堆排序(Heap Sort)——选择排序的改进
思想:
- 利用堆(完全二叉树)的性质:根是最大(或最小)
- 构建大根堆 → 取堆顶(最大)→ 与末尾交换 → 调整堆 → 重复
关键操作:
- 建堆:从最后一个非叶子结点开始向下调整
- 堆调整(shift_down) :维护堆性质
性能分析:
| 情况 | 时间复杂度 |
|---|---|
| 所有情况 | |
| 空间复杂度 | |
| 稳定性 | ❌ 不稳定 |
4. 归并排序(Merge Sort)——稳定且高效
思想(分治 + 合并) :
- 将数组分成两半,递归排序
- 将两个有序子数组合并成一个有序数组
合并过程(双指针法) :
- 用临时数组存放结果
- 比较两数组当前元素,小的放入结果
性能分析:
| 情况 | 时间复杂度 |
|---|---|
| 所有情况 | |
| 空间复杂度 | |
| 稳定性 | ✅ 稳定 |
三、五大排序方法对比表
